
- SPEC
- 宇宙エレベータークライマー開発に取り組む学生チームの紹介『京都大学』
宇宙エレベータークライマー開発に取り組む学生チームの紹介『京都大学』
チーム名:許由『KYOSEN』
クライマー名:T
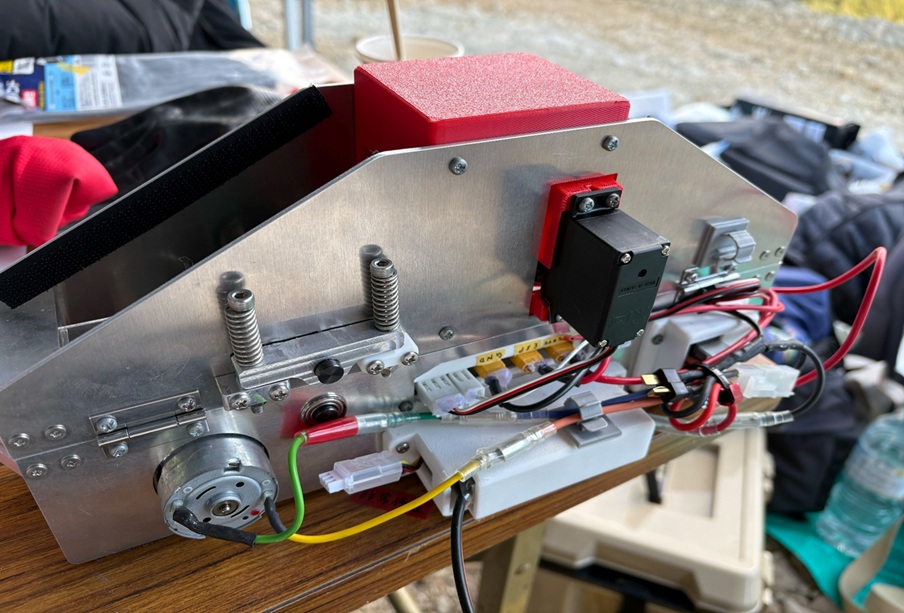
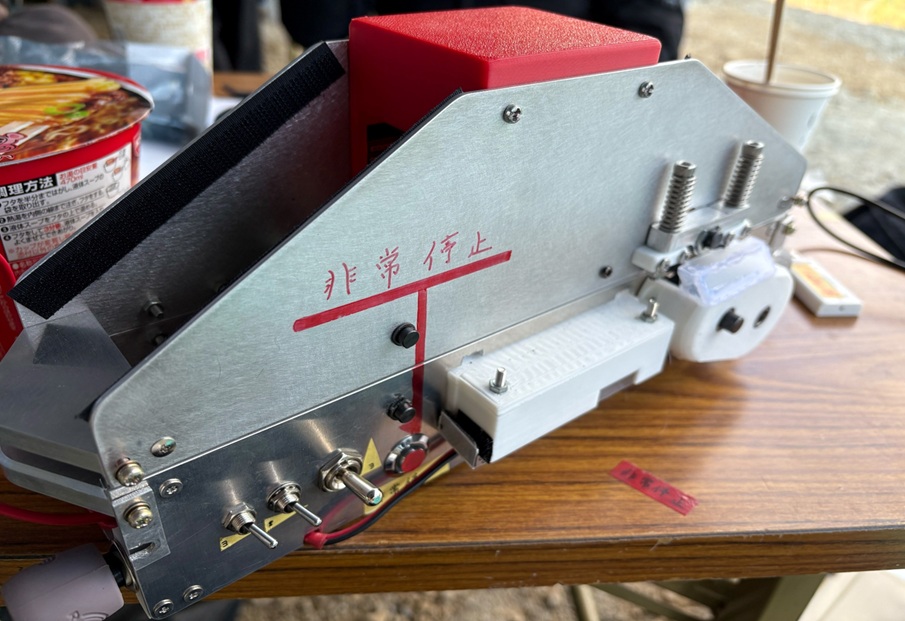
<特徴> 必要最低限の機能のみを搭載したミニマムで軽量なモデルであるほか、インストールも簡便
スペック詳細
| 外観 | サイズ/縦横高[mm] | 360mm x 150mm x 160mm |
| 重量[g] | 1.7kg | |
| モータ | 種類 | ブラシレスDCモーター |
| メーカー | TAMIYA | |
| 型式 | AO-8033 タミヤギヤードモーター 540K75 | |
| 出力[W] | 46W | |
| 個数 | 1 | |
| 総出力[W](出力[W]×個数) | 46W | |
| バッテリー | 種類 | リチウムポリマー |
| メーカー | Zeee | |
| 型式 | ||
| 電圧[V] | 11.1V | |
| 容量[Ah] | 1.2Ah | |
| 個数 | 1 | |
| 総容量[Ah](容量[Ah]×個数) | 1.2Ah | |
| 減速機能 | 有無 | 有 |
| 方式 | 平歯車 | |
| 減速比 | 75分の1 | |
| 駆動ローラ | 方式 | 対向ローラー |
| 個数 | 4 | |
| 表面素材 | ウレタン | |
| 直径[mm] | 40mm x 2個、25mm x 2個 | |
| 制御 | 方式 | 自立コンピュータ/無線複合 |
| ソフトウエア | Arduino IDE | |
| 環境測定能力 | 種類 | なし |
| データ蓄積方法 | ||
| 無線出力(無線LANも) | 有無 | 有 |
| 目的 | 上昇開始と下降停止の制御 | |
| 周波数 | 2.4GHz | |
| 準備 | 事前テスト実施の有無 | 無 |
| 上昇記録[m] | ||
| 上端、下端検知 | 高度(上昇距離)測定能力の有無 | 無 |
| 方式 | ||
| 撮影 | クライマー搭載カメラの有無 | 無 |
| 撮影対象 | ||
| 地上の映り込み有無 |
